
What is COS for robotics¶
Warning
Beta Notice: COS for robotics is currently in beta.
Content and features may change,
and some functionality may be incomplete or experimental.
Feedback is welcome as we continue to improve.
COS for robotics stands for Canonical Observability Stack for robotics and is a superset of COS Lite. COS for robotics brings observability to your robots and devices.
When deploying robots, the need to collect data arises sooner than expected. One might need to visualize live or previously stored data. The necessity for data can have multiple causes: debugging, statistics analysis, monitoring, data collection for machine learning, etc.
Moreover, as new devices are deployed, the observability capacity has to scale effortlessly. For all these reasons COS for robotics has been developed, offering an observability infrastructure and solution for devices.
On the following drawing, we can see a fleet of devices using snaps to push data to the COS for robotics server, which is then available to the user for visualization.
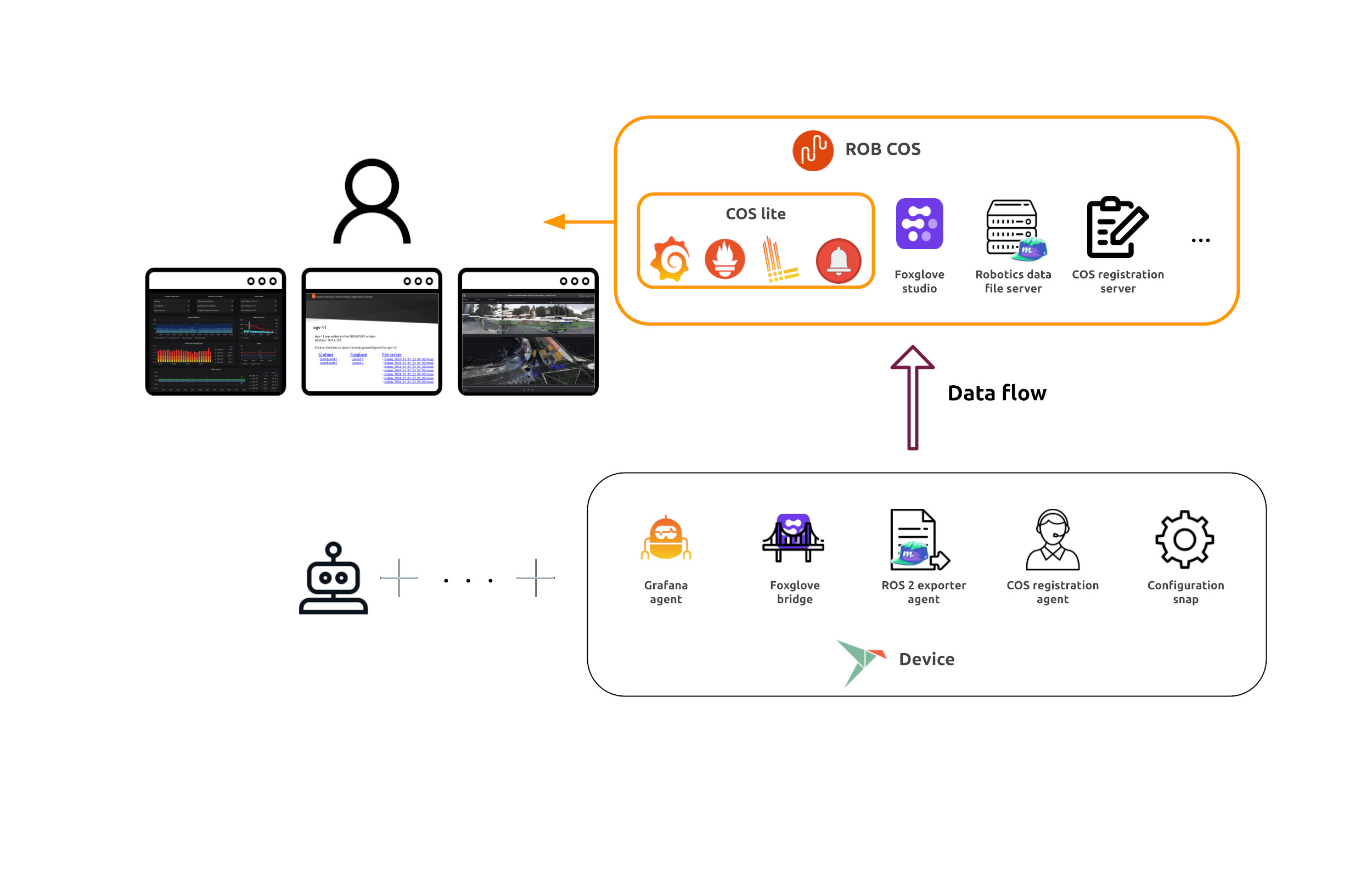
How COS for robotics works¶
The COS for robotics consists of two main components:
the server side: which hosts applications for monitoring, analysis and visualization extending COS lite.
the device side: a set of snaps that allow the robot to interface and communicate with the server.
The COS for robotics is already including a set of applications on the server and device side. By the modular nature of COS, you can easily select a subset of applications or even extend it with open source or even proprietary applications.
The COS for robotics is extending COS Lite in the sense that it can handle robotics data and that the clients can be deployed on devices via snaps.
The server side¶
The server side (which can run on the cloud, a laptop, or any capable machine) relies on Juju, an open source orchestration engine, to easily deploy applications at any scale and Microk8s, a lightweight Kubernetes cluster bringing stability, security and scalability.
Every application running in Juju is a charmed operator (charm). This means the server side can also benefit from charmhub.io to get seamless updates over time.
The COS for robotics consists of a Juju bundle ready to be deployed on any Juju k8s machine.
This bundle can easily be extended by the mean of an overlay.
Charms bundled in the COS for robotics are responsible for data visualization and data storage. The applications expected on the servers can be:
Data processing
Data analytics and visualization
Monitoring system and data models
Alert manager
Logs aggregator
Anomaly detector
VPN server
The device side¶
On devices, the COS for robotics consists of a set of snap packages. Snaps packages are particularly suited for robotics and their limited resources reducing the need for on device operations. Installed snaps will benefit from seamless updates and rollback from the Snap Store. Additionally, thanks to snaps, the device side can run completely from the Ubuntu Core Operating system engineered for IoT and embedded.
Snaps running on the device are responsible for collecting data and syncing them to the server side. By the mean of configuration, device’s snaps could collect and synchronize data according to the bandwidth and storage available.
The applications expected on the devices can be:
Telemetry collectors
Data collectors (i.e: ROS 2 data)
Logs collectors
VPN client
Device manager client
Who is COS for robotics for¶
The COS for robotics stack is fully open source, so anyone can use it. Since the COS for robotics is meant to observe devices, the typical use case is to observe a fleet of devices. Thanks to the P2P VPN, devices can be on the same site or not.
COS for robotics is deployed with Juju, meaning anyone can deploy COS for robotics as a secure, scalable and resilient server.
The typical use case of COS for robotics is for a company to deploy a complete observability stack for a fleet of devices.
Whether deployed on self-hosted infrastructure or in the cloud, COS for robotics can meet all the observability needs of an organization.
Additionally, Canonical offers a managed version of COS for robotics so you can focus on your business. We will run the best-in-class open source monitoring tools you need for the observability of your applications.
You can learn more about open source observability on ubuntu.com/observability.
The generic COS documentation can be found on charmhub.io.